In my last post, I described briefly how iris recognition works. I also described the four main modules that make up a general iris recognition system. In this post I am going to discuss some of the desirable properties of the iris acquisition module, or simply the iris camera. Although the acquisition module is the first block in the iris authentication/verification pipeline and it plays a very important role, the module has received much less attention of the researchers compared to the others.
Iris recognition algorithms have become quite mature and robust in past decade due to the rapid expansion of research both in industry and academia [1–3]. Figure 1 shows a plot of the scientific publications (in English) on iris recognition between 1990 and 2013. The plot also shows the relative number of papers exclusively addressing the problems of the acquisition module, which is really very minuscule, compared to the total number of papers on iris recognition.
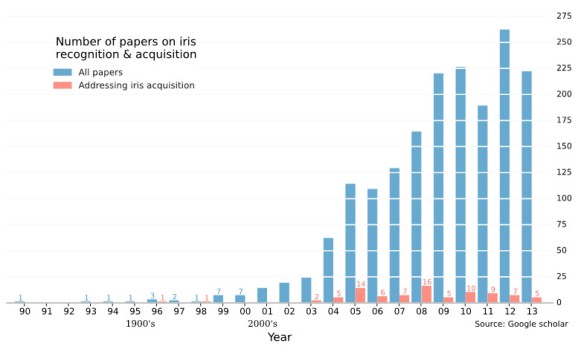
Figure 1. Number of publications in (English) journals on iris recognition between 1990 and 2013. The data was collected using Google scholar by searching the keywords IRIS + RECOGNITION + ACQUISITION + SEGMENTATION + NORMALIZATION + MATCHING. The plot shows that although the total number of research papers on iris recognition has grown tremendously during the last decade, the problems associated with iris acquisition have been overlooked.
The accuracy of iris recognition is highly dependent on the quality of iris images captured by the acquisition module. The key design constraints of the acquisition system are spatial resolution, standoff distance (the distance between the front of the lens and the subject), capture volume, subject motion, subject gaze direction and ambient environment [4]. Perhaps the most important of these are spatial resolution, standoff distance, and capture volume. They are described in details in the following paragraphs.
